By: mk 
 on 17 March 2025 - 10:14
Tags:
on 17 March 2025 - 10:14
Tags:
ประเด็นเรื่องกล้อง vs lidar เป็นสิ่งที่ถกเถียงกันมานานในวงการรถยนต์ไร้คนขับ ซึ่งนิกาย Elon Musk และผู้ศรัทธา บอกเสมอว่ากล้องนั้นเพียงพอแล้ว ไม่จำเป็นต้องใช้ lidar
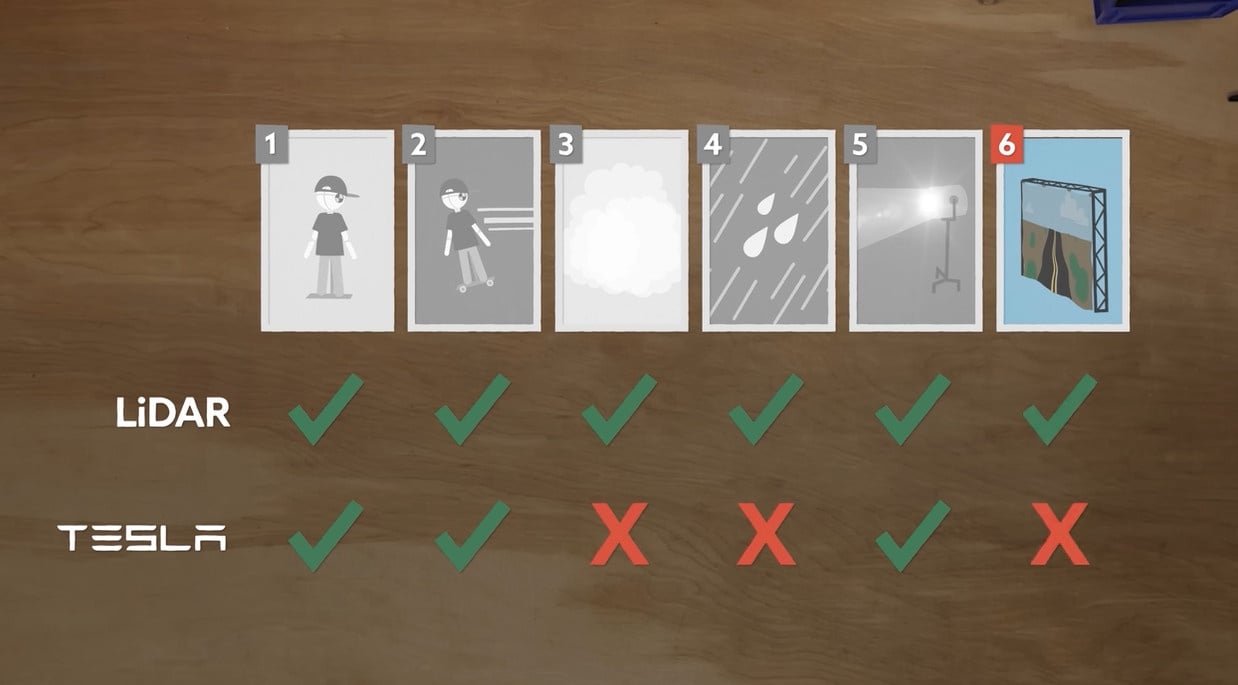
ยูทูบเบอร์ Mark Rober จึงจัดการทดสอบ โดยนำ Tesla Model Y เปิดโหมด Autopilot เทียบกับรถยนต์รุ่นอื่นๆ ที่ใช้ lidar ช่วยตรวจจับสภาพแวดล้อม การทดสอบสำคัญคือสร้าง "ฉากถนนปลอม" (เหมือนในการ์ตูนเรื่อง Road Runner) แล้วดูว่ารถยนต์ทั้งสองรุ่นจะตรวจจับถนนปลอมได้หรือไม่
ผลการทดสอบเป็นไปตามคาดคือ รถยนต์ lidar ตรวจเจอได้สบายๆ ในขณะที่ "ศรัทธา" Model Y ชนกับฉากกั้นเข้าเต็มๆ

การทดสอบของ Rober ยังนำหุ่นเด็กปลอมวิ่งเข้ามาขวางรถยนต์ ซึ่ง Model Y สามารถตรวจจับได้ในสภาพอากาศปกติ แต่ถ้าลองปล่อยหมอกควันหรือน้ำฝนมาขวางไว้ข้างหน้า ก็ไม่สามารถตรวจจับได้ และชนหุ่นเด็กเข้าเช่นกัน ในขณะที่ lidar สามารถตรวจจับได้ถูกต้องในทุกกรณี
ที่มา - Electrek
ช่วงทดสอบชนกำแพง ประมาณนาทีที่ 14 ในคลิป

Get latest news from Blognone
Follow @twitterapi



Comments
ใช้กล้องก็น่าจะเหมือนตาคน โดนฝุ้งๆหรือมืดไม่เห็นก็ชน 5555 ข้อดีของกล้องก็น่าจะให้ fps ที่เยอะกว่า เอาไปข้อมูลไปใช้ต่อได้ง่ายกว่า
ศรัทธาไม่มีท้อ ครับ เชื่อต่อไป
กล้องก็เหมือนตาแปลว่า capability ก็เท่ากับตา คือเรื่องทัศนวิสัยไม่ดีตามองไม่เห้นกล้องก็มองไม่เห็น behave เหมือนมนุษย์กลายเป็นว่าไม่ได้สร้างความปลอดภัยกว่าเลย
อันนี้เทส model y ตัวเก่า ก็ต้องดูว่าตัวใหม่ติดกล้องกันชนแล้วจะแก้ปัญหาเรื่องพวกนี้ได้ไหม
สรุปว่าข้อดีของกล้องอย่างเดียวคืออะไรนอกจากอีลอนได้ลดต้นทุนรถเนี่ย
ถ้าเราจะซื้อพวก FSD เราก็ต้องการอะไรที่มันดีกว่าแค่เหมือนตาเราไหมนะ การที่หลายๆ แบรนด์มี lidar ใส่เข้ามาคงเพราะแบบนั้น
ขนาดทุกวันนี้เราใช้งานระบบ sonar เพื่อกะระยะคันข้างหน้าและแจ้งเตือน ไปพร้อมๆ กับกล้อง dashcam ที่มี adas ช่วยกะระยะ ระบบมันแจ้งเตือนยังไม่เท่ากันเลย
นี่ใช้แต่กล้องก็ต้องระวังให้มาก เพราะมันไม่ใช่ทุกอย่างที่จะเห็นได้ด้วยตาและตัดสินใจได้เร็วพอ การมี lidar มันช่วยเพิ่มข้อมูลให้ FSD มันตัดสินใจให้ดีขึ้น
การใส่ LiDAR ให้ทำงานร่วมกันกับกล้อง ทำให้เพิ่มความจริงเข้าไปในระบบ เพิ่มเวลาในการตัดสินใจ อาจส่งผลให้เหมือนกันกับ sonar ทำงานผสมกับ dash cam ตามที่คุณยกตัวอย่าง
ในสภาวะทัศนวิสัยที่มองด้วยตาเปล่าลำบาก มนุษย์ยังกล้าที่จะขับรถยนต์จริงๆ หรือครับ
ส่วนตัวผมแอบไม่เห็นด้วยนะครับ
เห็นหลายๆคอมเมนท์ว่าควรเพิ่มเซนเซอร์หลายๆแบบเข้าไป แต่ส่วนตัวแล้วผมมองว่าการเพิ่มข้อมูล มันไม่ได้ช่วยให้ตัดสินใจได้ดีขึ้นเสมอ และอาจจะแย่ลงด้วยซ้ำ
นอกจากการประมวลผลข้อมูลแต่ละเซนเซอร์ที่เพิ่มขึ้นแล้ว มันก็ต้องประมวลผลเมื่อนำข้อมูลมารวมกันด้วย ในแง่ความเร็วของการประมวลผลก็อาจจะทำให้ช้าลงได้ ในแง่ความแม่นยำในการตัดสินใจ ถ้าข้อมูลทั้งหมดมันไปในทางเดียวกันก็ไม่ยากเท่าไหร่ แต่ถ้าข้อมูลบางส่วนมันผิดจากกัน การตัดสินใจให้ถูกต้องมันจะทำได้ยากขึ้น และเพิ่มโอกาสในการตัดสินใจผิดมากขึ้นครับ
ยกตัวอย่างเช่น ถ้าคนขับเห็นถนนด้านหน้าโล่งแต่ดันได้ยินเสียงรถด้านหน้าด้วย (ก็คือข้อมูลขัดกัน) ผมเชื่อว่าคนขับหลายคนจะตัดสินใจไม่เหมือนกันครับ
ไม่ได้จะบอกว่าใช้กล้องอย่างเดียวดีกว่านะครับ แต่ผมมองว่า ไม่ว่าจะใช้เซนเซอร์เดียวหรือหลายเซนเซอร์มันก็มีข้อดีข้อเสียแตกต่างกัน ไม่ใช่ว่าการเพิ่มเซนเซอร์จะมีแต่ข้อดีอย่างเดียวครับ
อยากรู้ว่าถ้าทุกคันใช้ Lidar กันหมด แล้วมันจะไม่ตีกันใช่ไหมครับ
ซึ่งถ้าบังเอิญชนกันแค่ 1 จุดก็คงจะโดน filter ออกได้ง่าย ๆ
ไม่สนใจที่จะใช้ระบบดิจิทัลพวกนี้อยู่แล้ว ขับเองล้วนๆอยู่แล้ว ก็เลยยังรักและศรัทธาใน Swasticar อยู่เช่นเดิม อย่างน้อยที่สุดมันถือเป็นอีวีค่ายตะวันตก ยังไงก็ยังดูดีกว่าอีวีจีนที่สังคมยังเหยียดอยู่มาก
อย่างว่าแหละ ไม่ดีกว่าตาคนแล้วจะซื้อไปทำไม
ถ้าเคสนี้ ตาคนยังเห็นดีกว่าตารถ ฮ่าๆ
คิดเหมือนกันครับ ว่าตัวกล้องยังไงก็ไม่น่าพอ
แอบอยากเห็น แปะ "ศรัทธา" ในข่าวของ Apple บ้างเหมือนกันนะครับ
ฟิลเดียวกันเลย 😂
ลดต้นทุน แค่นั้นแหละ
กล้องมันก็พอใช้ได้ ในสถานะการณ์ปกติ ไม่ดีเท่า LiDAR แต่ถูกกว่าเยอะ
เป็นปัญหาที่แก้เท่าไรก็แก้ไม่จบหรอก ต่อให้รถมีทั้ง LiDAR และกล้องก็ตาม LiDAR เองก็มีจุดอ่อนที่ว่าถ้ามันสะท้อนกับวัตถุที่สะท้อนแสงไปมาได้ก็เกิด False Positive หรือถ้าโดนคนมุ่งร้ายก็เกิด True Negative ได้อีก แล้วถ้าสมมติว่าเกิดเหตุการณ์ที่โมดูลหนึ่งจับได้ถูกแล้วอีกโมดูลจับได้ผิดล่ะ ใครสำคัญมากกว่ากัน
มันก็ควรแจ้งเตือนผู้ขับเป็นผู้ควบคุมตัดสินใจแทนในกรณีที่ controller ตัดสินใจไม่ได้ หรือชลอความเร็วเพื่อลดความสูญเสียอะไรก็ว่าไป แต่เอาจริงๆ sensor มันมีมากกว่า 2 น่าจะมี algorithm ที่สามารถวิเคราห์ว่าอันใหนเป็น false ได้นะ
กับเวลาน้อยกว่า 0.2 วินาที
อย่าให้มนุษย์ตัดสินใจอะไรเร็ว ๆ ในสภาพไม่ได้สนใจถนน ซึ่งก็คือกรณีของ FSD นี่แหละ (FSD: คนไม่ต้องสนใจถนนเลย รถจัดการเองทั้งหมด) จะคาดหวังให้คนหันปุ๊บปั๊บมาควบคุมพวงมาลัยไม่ได้
แต่ถ้าพูดถึง Tesla มันยังไม่ถึงขั้น FSD ด่าคนขับได้เต็มที่ แต่ส่วนหนึ่งก็ด่าการตลาดของ Tesla ได้เหมือนกันเพราะแค่ชื่อก็ชวนเข้าใจผิดแล้ว
การแจ้งเตือนให้มนุษย์รับรู้มันแค่ส่วนหนึ่งครับ ถ้าระบบจับได้ล่วงหน้าและไม่สามารถตัดสินไจได้ การชลอการหยุดก็เป็นอีกตัวช่วยหนึ่งเพื่อลดความสูญเสีย ของแบบนี้มันไม่มี solution ครอบจักรวาลหรอกครับ การเชื่อใจ(กล้อง)ระบบเดียวจึงเป็นเรื่องที่แย่ที่สุด
มีรถที่สามารถส่งสัญญาณ sonar หรืออะไรสักอย่าง เพื่อหาว่าตรงที่น้ำท่วมขังข้างหน้ามีฝาท่อที่ไม่ปิดอยู่มั้ยครับ ฮาาา กันตกท่อ
ผมว่าอาจจะเหมาะกับกรุงเทพก็ได้นะ
ความจริงกล้องหน้า stereo ตรวจจับความขลุขละและหลุมท่อบนพื้นผิวถนนได้นะ ระบบนี้ mb s-class ใช้อยู่ แต่เอาไว้ปรับกับช่วงล่างให้แข็งอ่อนตามสภาพถนน ส่วน tesla ไม่รู้ว่าจะใช้หลบได้หรือป่าว
ว่าแต่เขียนถึง sonar นี่ทำให้นึกถึงระบบช่วงล่างของ nissan cefiro a31 เลย
เราว่ายังไงก็ต้องใช้ Radar มาเสริมแบบ Model S รุ่นแรกๆ ที่มีอยู่ (แต่ Software สั่งปิดการทำงานไป) เพราะมันตรวจจับวัตถุแบบโปร่งแสงหรือหลอกตาได้ ตอนมีหมอกหนาหรือฝนตกไม่แรงมากยังตรวจจับวัตถุข้างหน้าได้ดีกว่ากล้องหลายเท่าเลย
แล้วไง scenario นี้จะมีจริงในชีวิตหรอ
คนที่แขวะ ก็แขวะไป ส่วนตัว ใช้แค่ auto steer อยู่ ก็ทุ่นแรง ลดความเหนื่อยในการขับรถไปเยอะ
มี (เฉยเลย)
ส่วนตัวถ้าไม่รู้จักใช้ technology ก็ให้ธรรมชาติคัดสรรไป
รู้ว่าเทคโนโลยีได้แค่ไหน ใช้แค่นั้น ทางที่ไม่เคยไป ก็อย่าวางใจ FSD
แล้วในลิ้งค์ก็ไม่ใช่ เคส tesla ชน
ถามหา Scenario อย่างเดียวนี่ ไม่ได้ถามหาว่าต้องเป็นเทสล่าด้วย
และการไม่ใช้เทคโนโลยีเกี่ยวอะไรกับธรรมชาติคัดสรร งง
เข้ามางงด้วยคนครับ - -'
จรั๊ฟพรี่ ขอโทษที่ทำให้งง จรั๊ฟ
ไปเรื่อยเลย เค้าคุยกันเรื่องเซ็นเซอร์เปรียบเทียบกันว่าตัวไหนดีกว่า ตัวไหนใช้สถานการณ์ไหนไม่ได้ ก็ไปอ้างเคสตัวอย่างมีมั้ย พอเค้ามีเคสตัวอย่างก็ไปอ้างเรื่องการใช้เทคต่ออีกไม่จบหรอกงี้คุยกันคนละเรื่องไหลไปเรื่อย แล้วในคลิปถ้าได้ดูเค้าไม่ได้พูดถึงแค่เคสนี้เคสเดียวนะที่กล้องมันจับไม่ได้มันมีทั้งเคสฝนตกเคสหมอกลงที่พบเจอได้ทั่วไปในปัจจุบันอีก
แบบใน vdo มันเอารูปไปกั้นถนนปะครับ ยังไม่ได้ดู VDO แต่ถ้าในรูปมันไม่มีถนน เทสล่าไม่น่าตรงไปปะไม่รู้แหะ
เพราะถ้าข้างหน้าไม่ใช่ถนน เทสล่าคงไม่ไป ทั้งการทดลองของ vdo ด้วย
คงไม่น่าตอบได้ เพราะผมเองก็ไม่เข้าใจว่าระบบภายในรถมันเป็นยังไง ผลทดสอบแค่บอกรถ Tesla มันไม่ยอมเบรก แต่รถที่ใช้ LiDAR เบรกกับภาพถนนหลอก
ทั้ง Point ของวิดีโอแค่อยากนำเสนอว่า กล้องมันโดนหลอกได้ถ้ามีคนคิดจะหลอกก็เท่านั้นเอง ซึ่งก็อันตรายทีเดียวเพราะเราจะไปหวังให้มนุษย์ทุกคนเป็นกัลยานชนไม่ได้ การยิงเลเซอร์รบกวน LiDAR ก็เช่นกัน
รถในคลิปเทส ใช้ HW 3.0 กล้องอย่างกาก ถ้าเป็น HW 4.0 ความคมชัดอย่างละเรื่อง
ผมรู้เยอะ แต่ขี้เกียจ อธิบาย คลิปมันจงใจชูโรงเรื่อง LiDar อวยขรี้แตก พวกไม่รู้เรื่อง ก็เออ ออตาม
ความคมชัดของ HW 4.0 จะทำให้รถไม่โดนหลอก? Reference?
เม้นแบบนี้ ขี้เกียจตอบ เสียพลังงาน ไปหาอ่านเอาเอง
เม้นแบบไหนทำให้ขี้เกียจตอบนะฮะ อันนี้ก็ถามกันดีๆ ในสิ่งที่ทั้ง ChatGPT, Google, Grok DeepSearch หาไม่เจอก็แล้ว (นอกจากบอกว่าหาไม่เจอว่ามีการทดสอบหรือจะช่วยได้ นอกจากอาจจะเห็นรายละเอียดพอว่าเป็นฉากแต่ไม่มั่นใจว่าความละเอียดเท่านั้นจะแยกฉากจากของจริงออกได้ แถมยังบอกว่าจุดสำคัญคือเรื่อง perception stack มากกว่าเรื่องความละเอียดของกล้องที่ก็น่าจะถูกอัปเกรดมากับ HW4 ด้วยแหละแต่ไม่มีข้อมูลว่าจะช่วยได้) แถมคุณออกตัวเองด้วยว่ารู้เยอะ ถ้ารู้เยอะในสิ่งที่หาข้อมูลยากแต่ไม่แชร์ไม่พิสูจน์อะไร (ซึ่งใช่ฮะ ไม่จำเป็นต้องพิสูจน์) ไม่ต้องบอกก็ได้ฮะว่ารู้เยอะ เสียพลังงานแบบไม่มีใครเชื่อเพราะไม่มีหลักฐานสนับสนุนเลย ยิ่งบอกว่าให้ไปหาอ่านเอาเองนี่คนจำนวนมากจะคิดว่าคุณเองก็ไม่มี ref ด้วยซ้ำ (ซึ่งเราก็เป็นบ่อย ขี้เกียจไปคุ้ยหา ref ที่เคยผ่านตาก็จะข้ามๆ ไป)
มีอยู่ 3 คนในนี้ ที่รุมผมอยู่ เหมือนคนเดียวกัน สลับ login มาเม้น
อยากให้คนอื่นพูดดีด้วย รบกวนช่วยใช้คำพูดดีๆ กับเค้าก่อนนะ
สันขวานมา ผมก็สันขวานกลับ
ref HW3 vs HW4
https://www.facebook.com/share/p/18ih3oXuHz/
มีปัญญาหา Reference อยู่นี่ ตอบแบบนี้ต้้งแต่เม้นแรกก็สิ้นเรื่อง สงสัยเสพติด Assertion Dominance บนอินเทอร์เน็ตจนหลอน หลอนถึงขนาดที่ว่าไม่รู้ตัวเลยว่าตัวเองเปิดประเด็นก่อนเพื่อนเลยแล้วมาโวยทีหลัง ไม่รู้ว่าไปเคียดแค้นอะไรกับ Misinformation ขนาดนั้นถึงขนาดต้องวิ่งเต้นคอมเม้นเป็นพรืด แยกไม่ออกเลยว่าอันไหนมุกอันไหนตั้งใจโจมตี Tesla แต่ก็เข้าใจแหละ ผู้บริโภคกับสาวกน่ะเนอะ
FYI; HW4 ไม่ได้ใช้กล้องอย่างเดียว
blognone มีแต่พวกเลอะเทอะ เยอะจัด บรัยละ ไม่ comment แล้ว
page facebook ก็ block ไปละ
อ่านโทน comment รู้สึกมานานแล้ว ว่ามีแต่พวก toxic
ขอบคุณครับ อันนี้จากระบบรถเห็นชัดเลยว่ามีบางอย่างอยู่ อยากเห็น HW3 กับ 4 เทสต์สถานการณ์เดียวกันบ้างเลยว่าจุดตัดมันอยู่ที่เคสประมาณไหน แต่หารายละเอียดขนาดนั้นน่าจะยาก time consuming อยู่
เฮ่อเหนื่อยใจคนที่ตัวเองtoxicแต่ไม่รู้ตัวว่าtoxicมโนไปเรื่อยว่าเค้าใช้หลายloginมารุมหัดไปดูประวัติโพสก็ได้ว่าบางอันผมก็เถียงกับคนในนี้มีเยอะแยะไม่แหกตาดูเอาแต่มโนไปเรื่อย เหตุผลไม่ต้องหยิบมาเถึยงใช้แต่อารมณ์เถียงล้วนๆ ผมไม่ได้บอกเลยนะว่าจะไม่เชื่อ ปัญหาคือคุณหาหยิบหลักฐานที่ทำให้เชื่อได้มาไม่ได้ ไม่มีการไปเทสเพื่อมาค้านการทดลองในคลิปมีแต่มามโนแย้งลอยๆโดยไม่มีหลักฐานว่ามันผิดยังโง้นอย่างงี้แต่ไอ้ที่แจ้งหลักฐานมาคือเหมือนไม่ได้ดูคลิปด้วยซ้ำจุดไหนที่ผิดก็ไม่เห็นออกมายอมรับแถไปเรื่อยถ้าคิดว่าการเถียงกันด้วยการใช้เหตุผลหรือการอธิบายมันเรียกว่าtoxic communityก็เชิญคุณกลับคอมมูดีๆของคุณที่ไม่มีการถกเถียงกันด้วยเหตุผลและหลักฐานแล้วใช้แต่อารมณ์กับฟีลลิ่งไปเถอะครับ
มุกใช้หลาย login นี่ก็โผล่มาเรื่อยเลย แอบสงสัยเหมือนกันว่าออกตัวก่อนเพื่อดิสเครดิตคนที่ตามมาอ่านหรือเค้าใช้ปลอบใจตัวเองกัน
ให้มันมีทั้งคู่ไปเลยจะเลือกทำไม
ก็ต้อง ลอง เป็นภาพ แล้วข้างหน้าไม่ใช่ถนนน่ะ ผมว่ามันไม่น่าไป คงคิดมาดีแล้ว(เหรอ)
เข้าใจว่า LiDAR ก็ error เยอะนะ เจอฝนก็แสงกระจายใช้ไม่ได้ไม่ใช่เหรอครับ ?
That is the way things are.
อย่าไปหวังว่าจะมีเทคสมบูรณ์แบบหรอกฮะมันยาก จากในคลิปฝนก็มีส่วนทำให้การวัดของLiDARแย่ลงครับแต่ก็ยังพอวัดได้ในระยะกระชั้นชิดขึ้นจนเบรคทันอยู่ดี สุดท้ายมันก็ยังวัดได้มากกว่ากล้องตรวจจับอยู่ดี อะไรที่ปลอดภัยกว่าก็ย่อมดีกว่ารวมๆก็มองเห็นได้ดีกว่าตาคนไปแล้ว ถ้าคิดว่าสภาพอากาศย่ำแย่เกินกว่าจะขับขี่ได้แต่ยังต้องไปต่อก็อาจจะตั้งความเร็วลดลงได้เพื่อให้มีเวลาที่เซ็นเซอร์จะทำงานได้มากขึ้นจนเบรคทันก็ได้
เหมือนใช้ช่วงคลื่นที่ทำงานได้ดีนะครับ เช่นไปกระทบดวงตาคนด้วย หรือทะลุผ่านหมองควัน อาจจะฝนได้ด้วยเปล่าไม่แน่ใจ
อืม แล้วสมมติถ้าเป็นกรณีแผ่นกระจก/พลาสติกใสขนาดใหญ่อยู่กลางถนนล่ะ? ไม่น่ารอดสินะ?
เรื่องนี้ มีภาคต่อด้วยครับ สรุปสั้นๆคือแฟนเทสล่าพยายามจับโป๊ะการทดลองนี้ ว่าไม่ได้เปิด autopilot แต่กลับกลายเป็นว่าเป็นการแฉเทสล่าไปอีกว่าตัวรถแอบปิด autopilot เองก่อนที่จะเกิดการชน https://electrek.co/2025/03/17/tesla-fans-exposes-shadiness-defend-autopilot-crash/
ไม่ได้ศรัทธา รอลดราคายุนะ
ความจริงออกมาแล้ว คนทำคลิปรับเงินจาก บริษัท Luminar
Mark (คนขับรถ) ทำการ activate autopilot ก่อนชนประมาณ 3 วินาที และจังหวะที่ชนนั้น สัญญาณแจ้งเตือนตรงหน้าจอแต่เฮียแกเสือกกดคันเร่งสวนเพื่อชน
ิอยากอ่านข้อมูล fact มากกว่า blog ปั่นการเมือง blognone ไปอ่าน faceboo page blink drive
Elon น่าจะฟ้อง คนเขียนข่าว blognone นะ มีอยู่คนๆ นึง ปั่นแต่ความเกลียดชัง ใส่อารมณ์ โยงการเมืองตลอด
ต่อให้เปิด 1 วินาทีก่อนชนแล้วมันไม่หยุดก็เรียกเป็นจุดบกพร่องได้อยู่ดี
ต่อให้เขารับเงินมาจากรัฐบาลจีน รัสเซีย ยูเครน หรือสหรัฐอเมริกา ก็ไม่ได้มีผลต่อความน่าเชื่อถือของการทดลอง เพราะการทดลองที่ไม่น่าเชื่อถือมันฟ้องตัวเองตั้งแต่กระบวนการจนถึงผลการทดลองอยู่แล้ว
จรั๊ฟพรี่ พรี่รับเงินจาก Act Blue เท่าไรจร๊ฟ ไว้ผมรวย ผมจะให้ อีก 3 เท่า
ความจริงออกมาคืออะไรมันจริงกี่โมง ได้กดเข้าไปดูคลิปบ้างมั้ยหนอ เค้าก็บอกอยู่ว่าเป็นเพื่อนกันกับคนสร้างเครื่องLiDARสวมอกแล้วก็เลยทำโปรเจ็คนี้ด้วยกัน ส่วนสปอนไม่สปอนใครสปอนนี่เอาrefจากไหนมาหรือแค่เห็นโลโก้เขียนว่า luminar กับหมวกเขียนว่า pixกับใช้มือถือpixelแล้วมโนเอาว่าสปอนแต่จริงๆมาร่วมโปรเจ็คก็คงเรียกได้แหละว่าสปอนเพราะสนับสนุนของให้ไปใช้ด้วยแถมออกโลโก้ในคลิปด้วยแต่ก็เป็นแค่เรื่องคาดเดาไม่มีrefใดๆอยู่ดี ส่วนในเรื่องของการเปิดactivate auto pilotก่อนชนนี่ก็ต้องโยงไปถึงเรื่องการทดสอบนี้ก่อนว่าเค้าต้องการทดสอบระบบ "ช่วยเบรคฉุกเฉิน" ไม่ใช่ระบบ FSD ซึ่งเพจที่อ้างอิงจากในคลิปเข้าใจผิดเต็มๆว่าเค้าเทสFSD แต่ในคลิปที่เค้าต้องเปิดระบบนี้ในteslaทีหลังเพราะรถteslaจะไม่ยอมช่วยเบรคเลยหากไม่เปิดโหมดauto pilotแค่นี้ก็เห็นแล้วว่าเพจที่หยิบเนื้อหามาโต้เถียงเผลอๆไม่ได้ดูคลิปด้วยซ้ำแค่ไปเอาคอมเม้นที่มีคนโต้แย้งมาแปลแล้วเขียนข่าวเฉยๆ อนาคตถ้ามีหลักฐานอะไรที่มันดีกว่านี้ว่าการทดลองในคลิปมันใช้ไม่ได้หรือไม่ถูกต้องผมก็พร้อมยอมรับและเปลี่ยนความเชื่อใหม่นะ แต่ดูจากหลักฐานตอนนี้คืออิหยังวะมากเหมือนแค่ติ่งออกมาปกป้องเฉยๆ
ถ้ามั่นหน้า ขนาดนั้นทำไมต้นโพส ลบคลิปจากช่อง
blognone ลบโพสเมื่อวาน ที่แขวะ สาวกศาสนา Elon ละ
ช่อง Mark Rober ก็ไม่ได้ลบคลิปออกนะครับ
Luminar ลบคลิป Mark Rober ออกจากเว็บตัวเองครับ
https://x.com/OwenSparks_/status/1901496258780360733
ขอบคุณครับ แต่พอดีเห็นเม้นเขาเขียนว่า ลบคลิปจากช่อง นะครับ เลยต้องตีความว่าจากช่อง | chennel ใน Youtube งี้นะครับ
ผมจะไม่เถียงเรื่องอะไรที่มันไม่เกี่ยวข้องกับในโพสนี้นะครับ ต้นทางอะไรของคุณพูดถึงอะไรก็ไม่รู้อยู่ดีๆก็หยิบมาแบบงงๆ
ผมขอหลักฐานที่ยืนยันว่าการทดสอบระบบช่วยเบรคของรถteslaมันมีปัญหาจริงๆ เรื่องอื่นไม่ขอพูดถึงนะครับไม่งั้นก็ไหลไปเรื่อยไม่จบถามอย่างตอบอย่างคุย1ไป2 แล้วไม่ใช่หลักฐานลอยๆไม่มีน้ำหนักแบบมโนเอาว่าอย่างงั้นอย่างงี้ด้วยนะขอแบบไปเทสจริงมาชนกันเลยว่าในสภาวะฝนตกหนักหมอกทึบฉากลูนี่ตูนมันมีปัญหาจริงมั้ยถ้ามีคนทำแล้วค่อยมาคุยกันต่อ ไม่ต้องไปโยงเรื่องanti-elonหรือการเมือง ผมเกลียดelonแต่ก็ไม่ได้อคติสุดโต่งขนาดว่าทุกอย่างจะต้องผิดไม่มีถูกอะไรถูกก็ว่าไปตามหลักฐานที่เห็นณตอนนั้นๆ
สิ่งที่เราได้เห็นจากข่าวนี้
ไม่น่าเชื่อว่าสังคม blognone ที่เป็นชาวเทค เข้าใจเรื่องวิทยาศาสตร์ และ ดูเหมือนจะเป็นคนคุณภาพ กลับละทิ้งเกือบทุกอย่าง กระโจนเข้าไปขย้ำ ฉวยโอกาสซ้ำเติม รวมถึงเผยแพร่ข้อมูล และความเห็นที่ผิดๆ โดยไม่วิเคราะห์ข้อมูล หรือรอการพิสูจน์ เพียงเพราะมีอคติกับแบรนด์ หรือบุคคล
เมื่อคุณอ่านตรงนี้แล้ว
ใช่แล้วผมหมายถึงคุณนั่นแหละ
แล้วสังคม blognone ต้องทำอย่างไรครับ หลับหูหลับตาเชื่อ Elon หรือ Mark คนใดคนนึงโดยไม่ discussion กันอย่างงั้นหรือเปล่าครับ?
Lidar มันเหนือกว่ากล้องธรรมดาในบางสถานการณ์อยู่แล้ว แต่ดูคลิปทดสอบแล้วก็แปลกๆหลายอย่าง เหมือนจงใจ override ระบบ อย่างคลิปชนกำแพงรูปถนน เหยียบคันเร่งส่ง? อีกอย่างเหมือนไม่ได้เทสที่ FSD เลยด้วยซ้ำ
จริงๆ Lidar ก็มีจุดอ่อนถ้าเจอการสะท้อนแสงมากๆถ้าจงใจจัดการทดสอบที่เป็นจุดอ่อนของ Lidar ก็อาจจะเจอพลาดทุกกรณีก็ได้เช่นกัน เช่นขับตามรถที่สะท้อนแสงใส่หรือฝนตกหนักมากๆ(ในคลิปแค่พ่นน้ำขวางสั้นๆ)
แต่ช่วงนี้กระแสการเมืองมาแรง ก็ตามนั้น...
ตามที่คุณ shub บอกข้างบนน่ะฮะ จริงๆ เค้าทดสอบเทียบระบบช่วยเบรคป้องกันการชน ซึ่งฟีเจอร์พวกนี้ปกติทดสอบก็ต้องเหยียบคันเร่งอยู่แล้ว
จงใจนั่นแหละ ทดสอบว่ารถมันจะยอมหยุดไหมถ้าเราตั้งใจปล่อยมันขับต่อไป และสถานการณ์ปกติเองเทสล่าก็ทำได้ดีในการหลบสิ่งอันตรายอยู่แล้ว ต่อให้เราขับเองก็ตาม แต่เคสนี้จงใจโจมตีจุดอ่อนของกล้องตรง ๆ นั่นหมายความว่า ต่อให้ไม่ได้ทดสอบ FSD หวยก็ไม่น่าจะออกต่างกัน
ทั้งนี้ทั้งนั้น คนมักบอกว่า LiDAR มีจุดอ่อน แต่มันไม่ได้ร้ายแรงอะไรขนาดนั้นโดยเฉพาะอย่างยิ่งถ้าใช้ร่วมกับกล้องด้วย รถ FSD เจ้าดังล้วนใช้ของเหล่านี้ร่วมกันทำงานอยู่แล้วเพราะทั้งคู่ล้วนมีจุดแข็งจุดอ่อนที่ต่างกัน แต่ Tesla ตั้งใจตัด Option นี้ออก Elon บอกเองว่า LiDAR มันไม่ได้มีผลอะไรขนาดนั้น ซึ่งวิดีโอนี้โจมตี Claim ดังกล่าวตรง ๆ เลย อย่างไรเสีย ถ้าลองเอาไปเทียบกับสเกลที่ใหญ่โตขึ้นเช่นเครื่องบิน เราจะรู้สึกได้เลยว่าถ้าเป็นเรื่องของความปลอดภัย ต่อให้มันช่วยนิดเดียว ถ้ามันช่วยได้จริงมันก็มีประโยชน์
ผมเข้าใจว่า FSD เหนือกว่าระบบพื้นฐานตรงมีใช้modelมาช่วยเทรน และHW version ใหม่กว่า เห็นฝั่งคนที่พยายามจำลองเหตุการณ์ด้วย FSD ก็เหมือนจะแยกแยะภาพถนนปลอมได้
ซึ่งถ้าปิด FSD ผมว่าระบบADASพื้นฐานก็ไม่ต่างจากรถทั่วๆไปตอนนี้ ที่ใช้sensor อย่างจำกัดพวกระบบ auto-brake ทั้งหลาย(บางยี่ห้อก็ใช้กล้องหน้ารถอย่างเดียว) ซึ่งในตลาดส่วนใหญ่แย่กว่านี้ด้วยซ้ำ ข้อจำกัดเยอะสุดๆ
แต่เรื่อง sensor ก็มีจุดตัดแบบคคห.บนๆว่า ใส่sensor เยอะไปก็อาจจะประมวลผลไม่ทันหรือขัดแย้งกันจนแย่กว่าเดิม หาจุดสมดุลได้ยาก อย่างเคสหลายปีก่อนที่รถไร้คนขับชนคนข้ามถนนตอนมืดๆ ก็มีLiDar นะถ้าจำไม่ผิด https://www.blognone.com/node/102569
เทสล่า ทำได้ไม่ดีนักนะ มันมีพลาด มีฟ้อง และ การเสียชีวิต เยอะ ดูการตรวจสอบของกระทรวงคมนาคมสหรัฐ (จำนวนการชนด้วย ระบบขับอัตโนมัติ เยอะที่สุด แม้เทียบกับรถที่มียอดขายเท่ากัน) หรือ ยูโร เอ็นแค็ปได้ (เทสล่า ออโต้ไพลอต และ FSD แย่ที่สุด ในการทดสอบ)
อย่างในเว็บเทสล่าเอง ก็ดี ที่บอกว่า ต้องระวังถ้า มืด หรือ ฝนตกหนัก
อย่างรถมีเรดาร์ (ไม่ต้องลิดาร์) ขับมาแล้ว ฝนตกหนักที่ปัดน้ำฝนเบอร์สาม กะระยะห่างจากคันหน้าได้ 100 เปอร์เซ็นต์