By: mk 
 on 25 May 2018 - 13:28
Tags:
on 25 May 2018 - 13:28
Tags:

จากกรณี รถยนต์ไร้คนขับของ Uber ชนคนเดินเท้าเสียชีวิต ในที่สุด คณะกรรมการความปลอดภัยคมนาคม (National Transportation Safety Board - NTSB) ของสหรัฐก็ออกผลสอบสวนเบื้องต้น (preliminary report) ต่อสาธารณะแล้ว
รถยนต์คันที่เกิดเหตุเป็น Volvo ที่ติดตั้งระบบไร้คนขับของ Uber เข้ามา (มีกล้องทั้งหมด 10 ตัว) รถคันนี้มีการทำงาน 2 โหมดคืออัตโนมัติ และขับด้วยคน ซึ่งการทำงานในโหมดอัตโนมัติ ระบบรักษาความปลอดภัยของ Volvo จะถูกปิดเอาไว้ และจะกลับมาทำงานถ้าเปลี่ยนมาเป็นโหมดขับด้วยคน ซึ่งการเปลี่ยนโหมดจะมีขึ้นเมื่อคนขับหมุนพวงมาลัย/เหยียบคันเร่ง/เบรก/กดปุ่มปิดโหมด
ส่วนจุดเกิดเหตุ ถนน Mill Avenue ช่วงนั้นเป็นจุดที่มีเกาะกลางซึ่งมีพุ่มไม้และทางเดินที่เป็นอิฐ โดยมีป้ายเตือนให้คนไปข้ามถนนที่ทางข้าม ซึ่งอยู่ห่างออกไป 360 ฟุต (ประมาณ 110 เมตร)
ช่วงที่เกิดเหตุ คนขับของ Uber นำรถออกจากโรงจอดในเวลา 21.14 เพื่อวิ่งทดสอบตามเส้นทางเดิม โหมดอัตโนมัติถูกเปิดเวลา 21.39 ก่อนเวลาชน 19 นาที (ชนตอน 21.58) โดยขณะที่รถชน เป็นการวิ่งรอบที่สองในเส้นทางนั้น
เหตุการณ์ขณะเกิดเหตุ รถยนต์วิ่งมาด้วยความเร็ว 43 ไมล์/ชม. (ประมาณ 70 กม./ชม.) ระบบเรดาร์และ LIDAR ตรวจสอบคนข้ามถนนก่อนชนเป็นเวลานานถึง 6 วินาที ตอนแรกระบบไม่สามารถแยกประเภทของวัตถุได้ (มองเป็น unknown object) เมื่อรถยนต์ขยับเข้าไปใกล้มากขึ้น ค่อยมองเห็นเป็นพาหนะ (vehicle) และจักรยาน (bicycle) ตามลำดับ
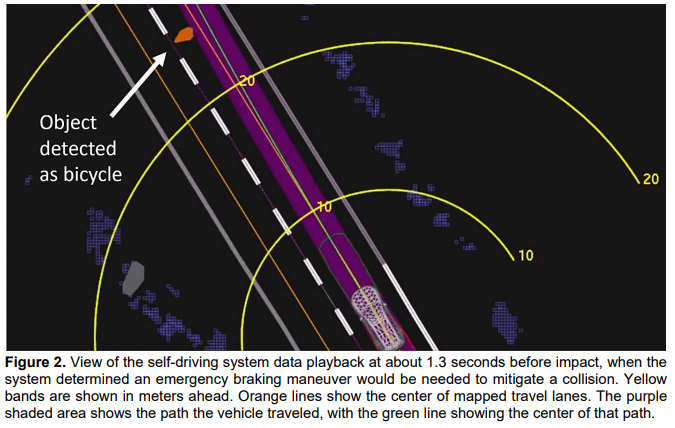
ประเด็นสำคัญคือก่อนชน 1.3 วินาที (ตามภาพ) ระบบขับเคลื่อนอัตโนมัติตัดสินว่าต้องเหยียบเบรกฉุกเฉิน (emergency brake) เพื่อลดแรงปะทะ แต่ระบบของ Uber ระบบเบรกฉุกเฉินไม่ถูกเปิดใช้งานในโหมดอัตโนมัติ เพื่อลดพฤติกรรมรถยนต์ทำงานแปลกๆ ในกรณีทั่วไป และจำเป็นต้องอาศัยมนุษย์เป็นคนเบรก เมื่อคนขับไม่ได้มองไปข้างหน้าในตอนนั้น และระบบไม่มีการแจ้งเตือนคนขับ ทำให้รถชนคนจนเสียชีวิต
ข้อมูลจากระบบขับเคลื่อนอัตโนมัติ ระบุว่าคนขับเหยียบเบรกก่อนชนน้อยกว่า 1 วินาที ตอนนั้นความเร็วรถอยู่ที่ 39 ไมล์/ชม. (62 กม./ชม.) ข้อมูลจากรถ ระบุว่าระบบขับเคลื่อนอัตโนมัติทำงานได้ปกติทุกประการ และไม่มีข้อความแจ้งเตือนความผิดพลาดใดๆ ในระบบ
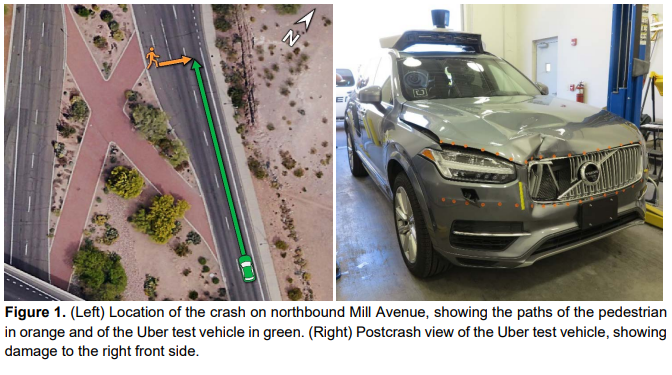
NTSB ระบุว่าจากวิดีโอหลายๆ ตัวในรถ แสดงให้เห็นว่าคนข้ามถนนเองก็ไม่ได้มองมาในทิศทางที่รถกำลังวิ่งมา ใส่ชุดสีเข้ม และจักรยานก็ไม่มีป้ายสะท้อนแสงด้านข้าง (ซึ่งเป็นด้านที่รถมองเห็น) มีเฉพาะด้านหน้าและด้านหลัง ส่วนจุดที่ข้ามถนนก็เป็นจุดที่ไฟถนนส่องไม่ถึงด้วย
ส่วนประเด็นเรื่องคนขับรถเล่นมือถือขณะเกิดเหตุนั้น คนขับระบุว่าก้มลงมองจอของระบบขับเคลื่อนอัตโนมัติ และไม่ได้ใช้งานโทรศัพท์เลยจนกระทั่งเกิดการชนแล้ว และใช้โทรเรียก 911 เพื่อแจ้งเหตุ
NTSB บอกว่าจะรวบรวมข้อมูลในคดีนี้ต่อไป และทำงานร่วมกับผู้มีส่วนเกี่ยวข้องทุกฝ่ายเพื่อสรุปรายงานสมบูรณ์ของการชนครั้งนี้
ที่มา - NTSB

Get latest news from Blognone
Follow @twitterapi
Hiring! บริษัทที่น่าสนใจ



Cloudnone
- AWS มาไทย ย้ายเลยดีไหม อะไรยังมาไม่ครบบ้าง? | Cloudnone Ep. 23
- NVIDIA จะไปหยุดที่ตรงไหน ทำไมครองโลกดาต้าเซ็นเตอร์ | Cloudnone EP.22
- ถึงคลาวด์เคราะห์: ทำอย่างไรเมื่อบริการคลาวด์ที่ใช้ถูกยกเลิก | Cloudnone EP. 21
- รู้จักอาชีพ Site Reliability Engineer สำคัญยังไง? | Cloudnone EP. 20
- อธิบาย CrowdStrike ทางเทคนิค ทำไมถึงทำพีซีจอฟ้าเป็นล้านๆ เครื่อง | Cloudnone EP.19
Comments
NSTB -> NTSB
ย่อหน้านี้ส่วนไหนหมายถึงระบบของ Uber ของ Volvo เหรอครับ? หรือทั้งหมดคือระบบของ Uber
อันนี้ Uber ก็พลาดที่ทำของมาดึงความสนใจคนขับในระบบที่ยังต้องให้คนขับคอยดูถนน?
ระบบของ Uber ครับ
ถ้าระบบของ Uber เปิด ระบบ Volvo จะปิด
ถ้าระบบของ Uber ปิด ระบบ Volvo จะเปิด
สองระบบจะไม่ทำงานพร้อมกัน
พอดีใช้ volvo อยู่ครับ รุ่นนี้มันมี self-drivingระดับนึงอยู่แล้ว(เร่ง-เบรก, หักเลี้ยวตามเลนถนน) บทความน่าจะหมายถึงว่าระบบของ volvo detect เจอแล้วจะกดเบรกเอง แต่ระบบของ uber ไปปิด mode ให้ volvo เหยียบเบรก
ผมก็เคยเป็นจะแซงแบบเกือบจะปาดๆท้ายคันหน้าหน่อย รถมันดันเข้าใจว่าจะชนเลยกดเบรกให้ กลายเป็นเกือบโดนชนตูด
คือผมอ่านข่าวภาษาไทยแล้วเข้าใจว่า Uber ต้องการทดสอบ AI เพราะงั้นก็ต้องปิด AI ของ Volvo (ที่เกี่ยวกับความปลอดภัย)ไว้เพื่อไม่ให้ระบบมันตีกันหรือไม่ให้ผลการทดสอบคลาดเคลื่อน และขณะเกิดเหตุ AI ของ Uber กำลังทำงานอยู่ เพราะงั้น AI ของ Volvo (ที่เกี่ยวกับความปลอดภัย)จะไม่ทำงานอะไรเลย
ส่วนที่เป็นประเด็น ต้นฉบับเขียนไว้แบบนี้ครับ
ส่วน AI ของ Volvo (ที่เกี่ยวกับความปลอดภัย) หมายถึง
แย้งนิดนึงครับ ระบบขับเองของ Volvo ไม่ใช่ AI เป็นแค่ระบบช่วยขับครับ (Pilot Assist) ทำงานได้แค่ความเร็วนึง (น่าจะ 130) ระบบนี้เหมาะกับการใช้งานบนทางด่วนที่รถขยับที่ละน้อย ให้รถมันขับไปเอง โดยเราแค่จับพวงมาลัยแล้วดู ถ้าวิ่งในเมือง ผมเกือบชนคันหน้าหลายทีแล้ว เพราะโดนแทรกจากด้านข้าง แล้วเหมือนกับว่าพวกระบบช่วยเหลือต่างๆ จะปิดเองที่ความเร็วนึงด้วย ขับต่างจังหวัดความเร็วประมาณ 200 ระบบไฟหน้า Active High Beam ไม่ทำงานแล้ว เหมือนกันตัดแสงกับรถข้างๆ ไม่ทัน ต้องรอมือถึงเปิดไปสูงเลย
oxygen2.me, panithi's blog
Device: HP Zbook, iPad Pro, iPhone 15PM, iPhone 16+, Nothing Phone 1
ทำไมแบรคฉุกเฉินต้องใช้คนเหยียบ? แบบนี้มันก็เป็นระบบอัตโนมัติที่ไร้ประโยชย์โดนสิ้นเชิง
มันถูกปิดอยู่ในกรณีมีคน ก็แสดงว่ามันเปิดได้ แต่ไม่เปิด กลัวคนอยู่ในรถหัวทิ่มมั้งครับ
อยู่ในช่วงทดลอง พอมันอัตโนมัติจริงก็คงไม่ต้องใช้คนเหยียบ แต่นี่ปิดไว้เพื่อให้คนวิเคราะห์ก่อนว่าจะเหยียบมั้ย ตามข่าวคือไม่อยากให้ขับๆไป เบรก ขับๆไป เบรก
ผมว่าคนที่นั่งฝั่งคนขับ ยังไงก็ต้องรับผิดครับที่ไมสามารถตอบสนองหยุดรถได้ทันครับ และเลือกที่จะไม่มองถนนข้างหน้าด้วย
ความล้มเหลว คือจุดเริ่มต้นสู่ความหายนะ มีผลกระทบมากกว่าแค่เสียเงิน เวลา อนาคต และทรัพยากรที่เสียไป - จงอย่าล้มเหลว
ข้อนี้ผมว่าคนส่วนใหญ่ก็คงจะเห็นไปในทางเดียวกัน ที่สงสัยกันคงเป็นเรื่องที่ว่า เราจะสามารถไว้ใจระบบพวกนี้ได้แค่ไหนมากกว่าครับ
ส่วนตัว สันนิษฐานว่า น่าจะเป็น mode learning อยู่
ถ้ามันคิดว่าต้องเบรค แต่คนไม่เบรค มันจะได้รู้ว่าสถานการณ์แบบนี้ไม่ต้องเบรค
แต่เคสนี้มันต้องเบรค คนดันไม่เหยียบเบรค เลยจบเลย
น่าจะเป็นการยกการควบคุมกลับไปให้คนขับอีกทีครับ เพราะตัวเอไอมันอาจจะตัดสินใจพลาด (ถ้าตามข่าวคือมันยังตัดสินใจพลาดบ่อยอยู่ด้วย) และคนขับเองระหว่างขับขี่มีหน้าที่ที่จะต้องมองถนนอยู่ตลอดเวลาอยู่แล้ว ตรงนี้ก็เลยเป็นหน้าที่ของคนขับอยู่น่ะครับ
กำลังรู้สึกสงสัยว่าในกรณ๊นี้ใครผิด
ส่วนตัวมองว่า คนขับผิดที่ไม่มองทาง ผมคิดว่าตัวคนขับเองก็น่าจะรู้ข้อจำกัดของตัวรถอยู่แล้วว่ามันคงไม่เบรคเองถ้าเกิดเหตุสุดวิสัยเพราะนี่คงไม่ใช่ครั้งแรกที่เค้าขับทดสอบ แต่เค้าเลือกที่จะไม่สนใจข้างหน้าเอง เพราะงั้น เค้าน่าจะผิด
อาจจะ Uber ครับ ระบบ ตัวรถ รับผิดชอบโดย Uber คนขับก็ลูกจ้าง Uber ถ้า Uber จะโทษลูกจ้างตัวเองก็ไปฟ้องกันต่อ
ส่วนคนข้าม ก็อาจจะผิด คนละข้อหากัน
รวมๆ อาจจะประมาทร่วม
มืดอะ มืดมาก นี่มี Lidar จับได้ แล้วของ Elon ไม่มี Lidar ไม่ยิ่งจบเห่กว่านี้หรอครับ
The Last Wizard Of Century.
Tesla ใช้ RADAR
ตรวจเจอ คันที่อยู่หน้าคันข้างหน้า อีกที ได้ด้วยครับ
https://techcrunch.com/2018/03/19/heres-how-ubers-self-driving-cars-are-supposed-to-detect-pedestrians/
Uber ก็มี Radar นะครับ
ถ้าให้คนขับแบบที่ตอนนี้เป็นกันอยู่โดยทั่วไป, กรณีนี้จะชนรึป่าว? .. ถ้าใครอ่านรายงานแล้วพบเนื้อหาส่วนนี้อยู่, ช่วยชี้เป้าให้ด้วยนะครับ
ไม่น่ามีรายงานส่วนนี้นะครับ เพราะคนขับเองไม่ได้มองถนน ก็คงให้รายละเอียดไม่ได้ว่าสภาพแวดล้อมตอนนั้นเป็นยังไง เห็นคนในระยะกี่เมตร เห็นเป็นวัตถุน่าสงสัยก่อนรึเปล่า