By: lew 


 on 14 August 2020 - 01:44
Tags:
on 14 August 2020 - 01:44
Tags:
Topics:
ปัญญาประดิษฐ์ในกลุ่มปัญหาที่ใช้การฝึกฝน (Reinforcement Learning - RL) เป็นโจทย์สำคัญของวงการปัญญาดิษฐ์ นับตั้งแต่การสร้างปัญญาประดิษฐ์สำหรับเล่นเกม, ควบคุมหุ่นยนต์, หรือแม้แต่ควบคุมรถยนต์ในรถไร้คนขับ ที่ผ่านมาวงการวิจัยมักอาศัยการพัฒนาโมเดลจากโลกเสมือนเป็นโมเดลสามมิติ แต่โลกเสมือนก็ต่างจากโลกจริงหลายส่วน ล่าสุดกูเกิลเปิด Real-World RL (RWRL) เฟรมเวิร์คโอเพนซอร์สสำหรับการจำลองสภาพแวดล้อมที่เหมือนจริง
ข้อจำกัดที่เหมือนจริง เช่น ระบบความปลอดภัยที่ห้ามไม่ให้หุ่นเคลื่อนที่เร็วเกินไป, คำสั่งไปถึงหุ่นยนต์โดยใช้เวลานาน (delay), คำสั่งมีสัญญาณรบกวน, เซ็นเซอร์มีสัญญาณรบกวน, สภาพแวดล้อมเปลี่ยนไป (พื้นลื่น, หุ่นยนต์เปลี่ยนรูปร่างหรือน้ำหนัก)
การจำลองข้อจำกัดเหล่านี้ทำให้โมเดลที่กำลังพัฒนาใกล้พร้อมใช้งานมากขึ้น และไม่ต้องเสียค่าใช้จ่ายไปกับการทดสอบบนหุ่นยนต์จริงมากเกินไป
ที่มา - Google AI Blog
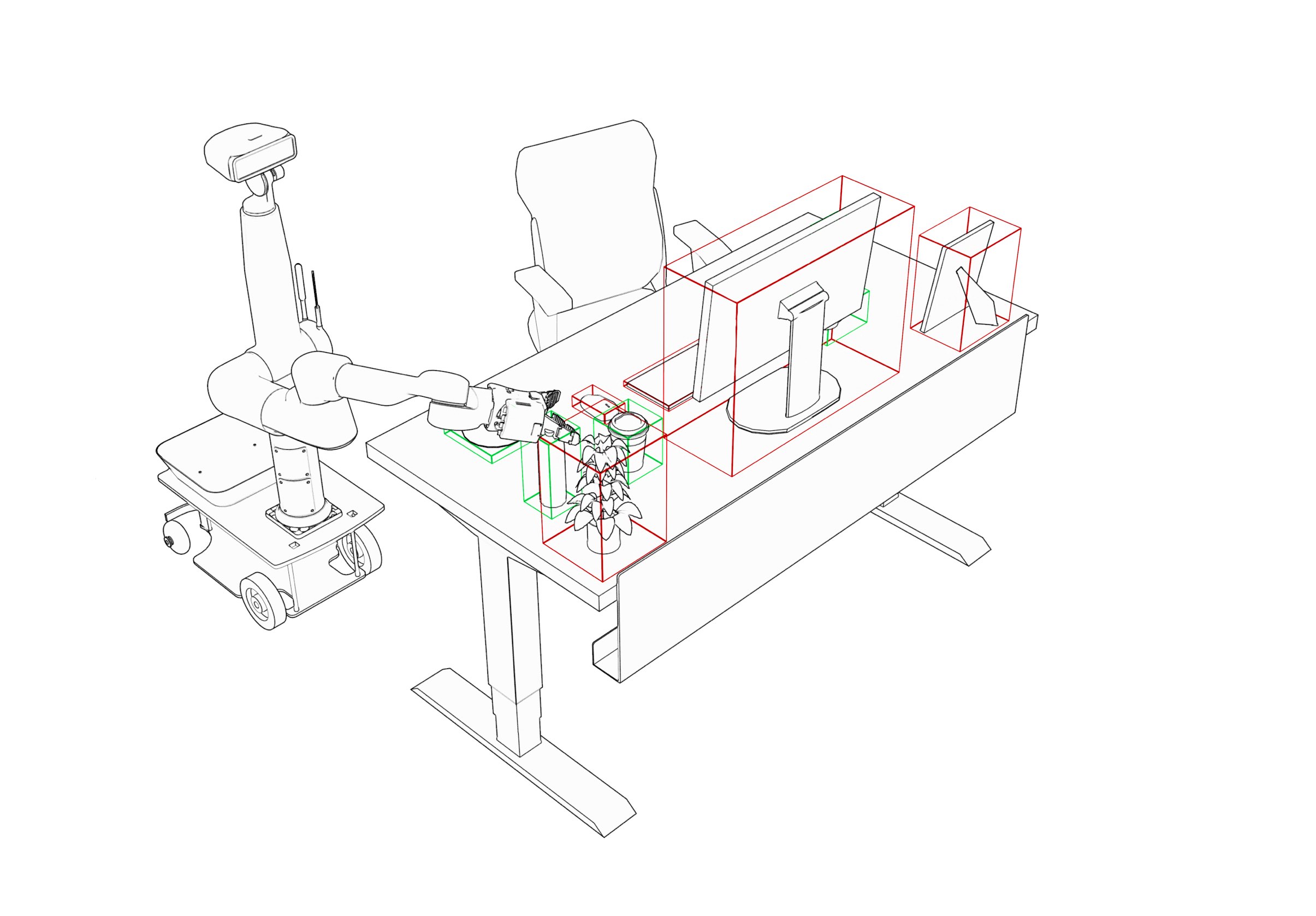
ภาพจากโครงการ Everyday Robot ของ X มุ่งสร้างหุ่นยนต์ที่สอนให้ทำงานตามมนุษย์ต้องการได้

Get latest news from Blognone
Follow @twitterapi



Comments
โมเดลที่กำลังพัฒนา
Project Maverick Hunter ต้องมาแล้ว ???
อนาคตอันไม่ไกลนี้ RWRL ก็พัฒนารุดหน้าให้ยิ่งสมจริงเพื่อพัฒนาโปรแกรมหุ่นให้สมจริง
หุ่น RL ก็พัฒนาให้เหมือนจริงใกล้เคียงมนุษย์มากขึ้น
สุดท้ายแม้แต่สภาพแวดล้อมภายใน RWRL ก็เหมือนโลกจริงจนแยกไม่ออก
ตัวหุ่น RL ก็มีความเคลื่อนไหวและความรู้สึกเหมือนมนุษย์จริงมาก
แล้ว The Matrix ก็ถือกำเนิดขึ้น